在现代汽车电子架构中,车载网络已经成为连接各类电控单元的核心神经系统。除了高速、高可靠性的CAN总线之外,还有一种专为低速、低成本、简单节点设计的通信技术被广泛应用,它就是 LIN总线(Local Interconnect Network)。作为CAN总线的辅助与补充,LIN总线以其极简的硬件结构、极低的成本和稳定的性能,占据了汽车底层分布式网络的重要位置,成为车身电子系统中不可或缺的通信载体。
一、LIN总线的起源与定位
早在20世纪90年代,汽车内的电子设备开始快速增加:门窗、座椅、灯光、雨刮、空调面板、各类传感器等大量非安全、非实时、低速率设备,都需要实现节点间的通信联动。
若将这类简单设备全部接入CAN总线,会出现两个明显的不合理性:
- 成本过高:CAN总线的控制器、收发器硬件价格偏高,且双线制线束与复杂电路设计,会大幅增加整车制造成本;
- 资源浪费:大多数简单执行器(如门窗电机)、传感器(如车内温湿度传感器),根本不需要CAN总线的高速传输、多主站、复杂容错机制,属于“大材小用”。
为解决这一矛盾,以 BMW、VW、Daimler、Volvo、Motorola、Philips 等汽车厂商与半导体企业为首,在1999年共同推出了 LIN总线规范,并在后续不断迭代优化,形成如今成熟的 LIN 2.0、LIN 2.1、LIN 2.2A等行业标准,逐步成为汽车车身电子领域的主流低成本通信方案。
核心定位:LIN总线是面向汽车低端分布式控制系统的单主多从、单线、低成本、低速串行通信总线。它不与CAN总线竞争,而是CAN总线的“专属助手”,二者协同工作,共同构成汽车完整、分层的车载网络架构。
二、LIN总线的核心特点
LIN总线的设计核心是“极简、低成本、适配低端节点”,其核心特点围绕这一目标展开,区别于CAN总线的高速、高可靠特性,具体如下:
1. 单主多从结构,通信有序无冲突
LIN总线采用严格的“单主站+多从站”架构,是其最核心的特征之一:
- 网络中只能有1个主机节点(Master),主导整个网络的通信节奏,负责发起所有通信请求;
- 网络中可接入 2~16个从机节点(Slave),从机不主动发起通信,仅在收到主机的询问指令时,才会反馈对应数据;
- 由于通信完全由主机控制,不存在多个节点同时发送数据的情况,因此无需设计CAN总线那样的仲裁机制,结构简单、运行稳定,不易出现通信冲突。
2. 单线制设计,成本控制极致
成本优势是LIN总线的核心竞争力,其单线制设计大幅降低了硬件与布线成本:
- 仅使用 一根信号线(LIN线)+ 一根地线(GND) 即可完成所有节点间的通信,无需差分信号线;
- 线束用量减少、布线难度降低,同时LIN收发器、控制器的价格远低于CAN总线相关硬件,适合大规模应用在车身各类低端节点;
- 适配车门、顶棚、座椅、灯光等分布式节点,无需复杂的线路布局,可灵活嵌入车身狭小空间。
3. 低速传输,适配非实时场景
LIN总线的传输速率专门匹配低端设备的通信需求,不追求高速,仅保证数据稳定传输:
- 典型传输速率:1.2k~20kbps,最常用的速率为9.6kbps;
- 最高传输速率一般不超过20kbps,无法满足动力、底盘等安全相关系统的实时通信需求;
- 专门用于连接开关、普通传感器、小型执行器等非安全、非实时设备,如门窗开关、雨刮电机、车内温湿度传感器等。
4. 固定通信模式,易于实现与维护
LIN总线采用“消息头+数据应答”的固定通信模式,时序清晰、逻辑简单,便于硬件实现和后期维护:
- 通信发起时,主机先发送消息头(Header),包含同步信号和消息标识符,告知从机“即将通信”及“通信内容”;
- 对应消息标识符的从机,在收到消息头后,发送数据应答(Response),包含具体数据和校验信息;
- 固定的通信结构,让LIN总线的软件开发、硬件调试难度大幅降低,后期故障排查也更便捷。
5. 自带校验机制,保障车规级可靠性
尽管LIN总线成本低、结构简单,但仍具备基础的可靠性保障,满足汽车车载环境的严苛要求:
- 采用 校验和(Checksum) 机制,主机发送数据后,从机反馈的应答数据中包含校验和,主机通过比对校验和,判断数据传输是否正确;
- 总线电平采用12V单端电平(隐性电平为12V,显性电平接近0V),能抵抗车内一定的电磁干扰(EMC),适应高温、振动、电压波动等车规级环境;
- 支持节点唤醒功能,可通过总线信号唤醒休眠的从机节点,降低整车功耗。
三、LIN总线的网络结构与硬件组成
LIN总线的网络结构和硬件组成均围绕“极简、低成本”设计,结构清晰、组件简单,以下结合网络拓扑结构图文字描述,详细说明其组成部分:
1. 网络拓扑结构
LIN总线采用总线型拓扑结构,所有节点并联在同一根LIN信号线上,整体结构简洁,无复杂分支,具体拓扑如下:
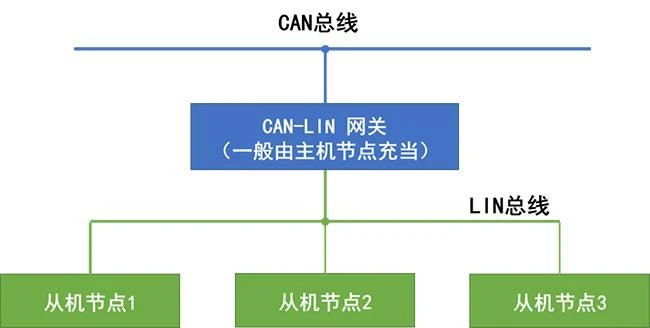
- 主机节点(Master Node):作为整个LIN网络的核心,通常集成在车身关键控制器中,常见的主机载体为 BCM(车身控制器)、车载网关、空调控制器;主机节点负责发起所有通信、管理总线时序、处理从机反馈数据,同时承担与CAN总线的协议转换(通过网关)。
- 从机节点(Slave Node):作为通信的被动响应端,均匀并联在LIN总线上,每个从机对应一个具体的车身设备,常见的从机载体为:门窗电机、雨刮电机、座椅调节开关、车内温湿度传感器、阅读灯、后视镜调节电机等;从机节点仅在收到主机的指令后,才会发送自身的数据(如传感器采集的温度数据)或执行相应动作(如门窗升降)。
- 总线线路:核心为一根LIN信号线(通常为紫色或其他专用颜色,便于区分),所有节点通过接口并联在该信号线上,再搭配一根公共地线,构成完整的通信回路;总线两端可根据需求添加终端电阻(通常为120Ω),用于匹配总线阻抗,减少信号反射,提升通信稳定性。
补充说明:实际车载LIN网络中,通常会按“功能分区”划分多个独立LIN子网(如车门子网、座椅子网),每个子网由一个主机节点(如BCM的对应功能模块)控制,子网间通过网关实现数据交互,避免单条总线节点过多导致的通信延迟。
2. 核心硬件组成
LIN总线的硬件组件简单,无需复杂的专用芯片,核心组成如下,且每个组件均聚焦“低成本、易集成”:
- LIN收发器:核心硬件之一,负责将微控制器(MCU)的UART信号转换为LIN总线电平(12V单端电平),实现信号的发送与接收;常见型号有TJA1020、TJA1021、PCA82C250(兼容LIN)等,价格低廉、体积小,可直接集成在从机设备的PCB板上。
- 微控制器(MCU):每个节点(主机、从机)均需配备MCU,主机MCU负责生成通信指令、处理数据,从机MCU负责采集设备状态(如传感器数据)、执行主机指令;MCU无需专用型号,普通8位、16位MCU(如STM32F103、PIC16F877)自带UART/SCI接口,即可满足LIN通信需求。
- 外围辅助电路:结构简单,仅包含上拉电阻(用于维持总线隐性电平)、二极管(防止反向电流)、滤波电容(抑制电磁干扰),无需复杂的驱动电路,进一步降低硬件成本。
- 总线电平规范:采用12V单端电平,与汽车车载电源(12V)匹配,无需额外电源转换;隐性电平(无数据传输时)为12V,显性电平(传输数据时)接近0V,电平变化清晰,便于节点识别。
3. 与CAN总线的硬件对比(简化表格)
| 硬件相关特性 | CAN总线 | LIN总线 |
|---|---|---|
| 线制 | 双线差分(CAN-H、CAN-L) | 单线单端(LIN线+GND) |
| 核心芯片 | CAN控制器+CAN收发器(如TJA1050) | LIN收发器(如TJA1020),无需专用控制器 |
| 外围电路 | 复杂,需终端电阻、滤波电路 | 简单,仅需上拉电阻、滤波电容 |
| 硬件成本 | 较高 | 极低 |
四、LIN总线的通信原理(附流程图文字描述)
LIN总线的通信逻辑严格遵循LIN协议规范,全程由主机节点主导,采用“帧”作为基本通信单元,无冲突、时序固定,核心依托“帧头+应答”的结构完成数据交互。结合LIN协议规范的帧结构、同步机制、校验规则等核心内容,以下详细拆解完整通信流程:
核心前提:LIN总线通信的所有动作均由主机节点发起,从机节点仅被动响应;总线实行“线-与”逻辑——当总线上有≥1个节点发送显性电平(0)时,总线呈显性;所有节点发送隐性电平(1)或不发送时,总线呈隐性(默认状态),显性电平起主导作用。
1. 核心基础:LIN帧的完整结构
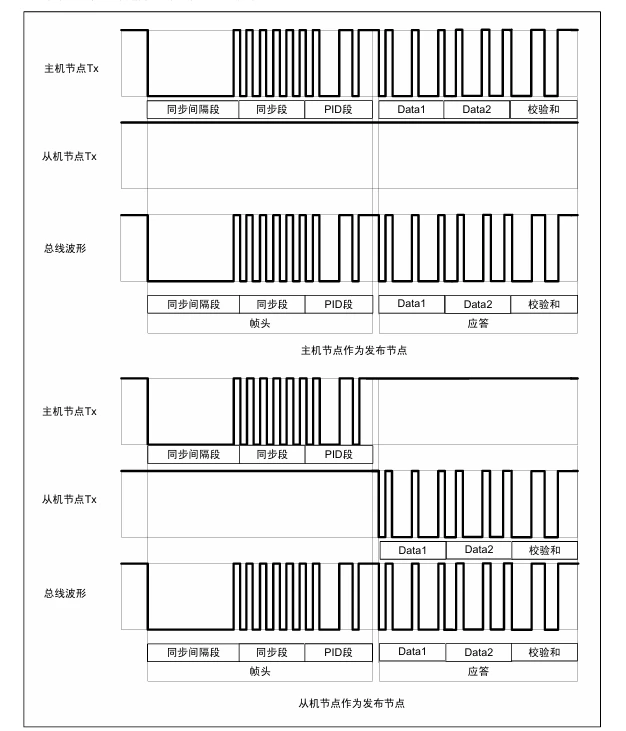
LIN总线的通信以“帧”为单位,每帧包含帧头(Header)和应答(Response)两部分,主机负责发送帧头,从机解析帧头后决定是否发送应答,帧的具体结构如下:
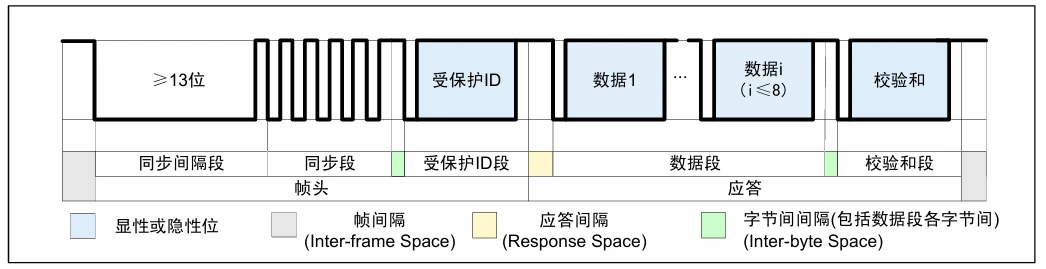
- 帧头:由同步间隔段、同步段、受保护ID段(PID)组成,均由主机发送,核心作用是唤醒从机、同步时序、明确通信目标;
- 应答:由数据段和校验和段组成,由匹配PID的从机发送,包含具体通信数据和校验信息;
- 各类间隔:帧间隔(帧之间的间隔)、应答间隔(帧头与应答之间的间隔)、字节间间隔(各字段字节之间的间隔),保障时序稳定。
2. 完整通信流程图
一次完整的LIN通信周期,围绕帧的发送与解析展开,分为4个核心步骤,详细拆解如下:
-
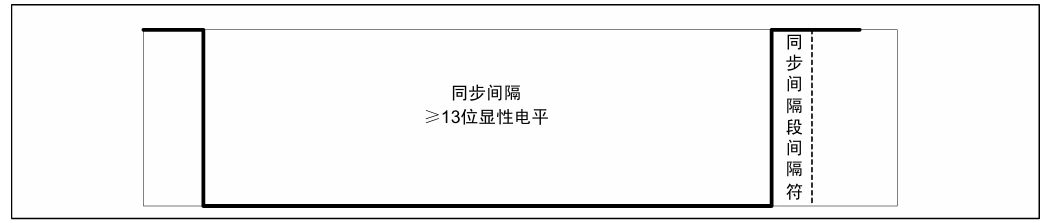
步骤1:主机发送同步间隔段(Break),唤醒总线
- 同步间隔段由同步间隔(Break)和同步间隔段间隔符(Break Delimiter)组成:同步间隔是≥13位的显性电平(接近0V),间隔符是≥1位的隐性电平(12V);
- 由于帧中其他字段不会出现>9位的显性电平,同步间隔可明确标志一帧的开始;主机发送该字段后,总线上所有从机节点被唤醒,同步到主机的通信时序(从机检测到≥11位显性电平时,判定为帧开始,高精度时钟可设为9.5位阈值);
-
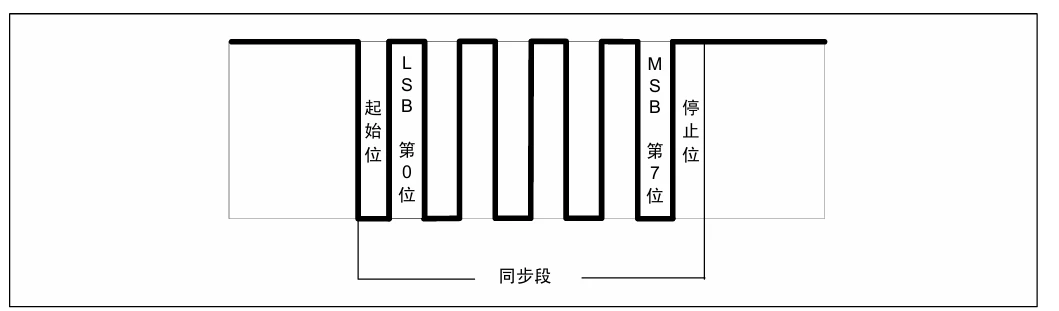
步骤2:主机发送同步段(Sync Byte),校准波特率
- 同步段采用标准UART字节域格式(1位起始位+8位数据位+1位停止位),数据固定为0x55(二进制01010101b);
- 从机节点可采用低成本、低精度时钟(如片上振荡器),通过接收同步段,计算主机的实际位速率,校准自身时钟,确保后续数据传输速率一致;位速率计算公式为:

-
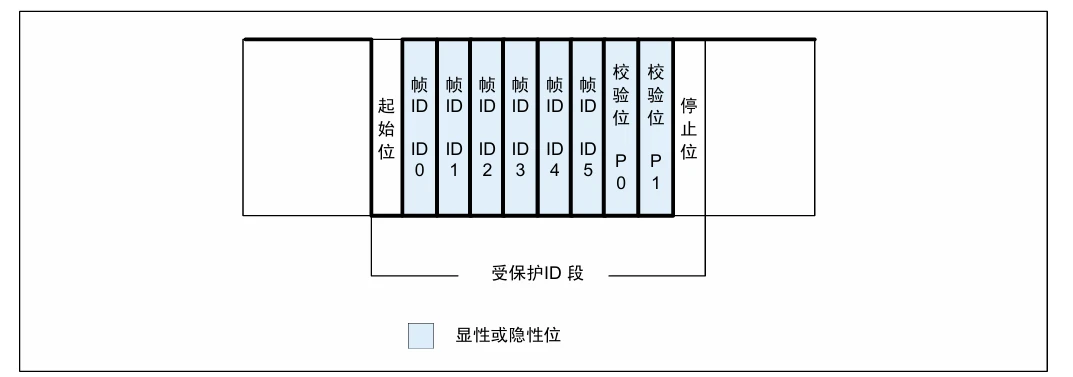
步骤3:主机发送受保护ID段(PID),明确通信对象与类型
- PID为1字节,由6位帧ID(0x00~0x3F,共64个)和2位奇偶校验位(P0、P1)组成,核心作用是标识“通信对象”和“帧类型”;
- 校验位计算公式: 、 ,确保PID不会出现全0或全1,便于从机检测传输错误;
- 所有从机接收PID后,解析帧ID并校验,仅与自身匹配的从机(对应帧ID的发布节点),准备发送应答;
-
步骤4:从机发送应答,主机校验数据,完成通信
- 匹配PID的从机发送应答,应答包含数据段(1~8字节,由系统设计者根据帧ID事先约定长度和内容)和校验和段;
- 校验和分为两种类型、:标准型(校验数据段各字节,用于诊断帧、与LIN1.x从机通信)、增强型(校验数据段+PID,用于与LIN2.x从机通信,诊断帧除外);校验方法为“带进位二进制加法+逐位取反”,接收方校验时,将重新计算的校验和(不取反)与接收的校验和相加,结果为0xFF则校验无误;
- 主机接收应答后,校验校验和:校验通过则记录数据,总线恢复隐性电平(空闲状态);校验失败则重新发送帧头,发起二次通信,多次失败则记录故障;
补充说明:一次完整的LIN通信周期,时长根据传输速率和数据长度而定,以9.6kbps速率、4字节数据为例,一次通信周期约为5~10ms,完全满足低端设备的通信需求;同时,通信过程中若从机检测到新的同步间隔段/同步段序列,会重新跳转至“接收PID”阶段,确保通信连续性。
五、LIN总线的典型应用场景
LIN总线的应用场景高度聚焦于汽车车身电子系统,覆盖所有“低速、低成本、非安全、非实时”的设备,是汽车上使用量最大、应用最广泛的总线之一,具体典型场景如下,按功能分区分类,清晰明了:
1. 车门模块(最核心应用场景)
每扇车门作为一个独立的LIN子网,主机通常为BCM的车门控制模块,从机为车门上的各类设备,实现车门相关功能的联动控制:
- 车窗升降电机:接收主机指令,实现车窗的升、降、暂停;
- 车门锁执行器:接收主机指令,实现车门的上锁、解锁,反馈门锁状态;
- 后视镜调节电机:控制后视镜的左右、上下调节,反馈调节位置;
- 门灯、氛围灯:接收主机指令,实现灯光的开启、关闭、亮度调节。
2. 座椅系统
座椅相关的控制节点均通过LIN总线连接,主机为座椅控制器,从机为各类调节开关和执行器,实现座椅的个性化调节:
- 座椅调节开关:采集用户的调节指令(前后、上下、靠背角度),反馈给主机;
- 座椅调节电机:接收主机指令,执行座椅的前后、上下、靠背调节动作;
- 座椅加热/通风模块:接收主机指令,开启/关闭加热/通风功能,反馈工作状态。
3. 顶棚与灯光系统
车内顶棚、灯光相关的低端节点,通过LIN总线实现集中控制,主机为BCM:
- 阅读灯:前后排阅读灯的开启、关闭、亮度调节,反馈灯光状态;
- 天窗/遮阳帘:控制天窗的开启、关闭、分段调节,遮阳帘的升降;
- 氛围灯:车内氛围灯的颜色切换、亮度调节,适配不同驾驶场景。
4. 空调与传感器系统
空调系统中的低端传感器和控制节点,通过LIN总线与空调控制器(主机)通信,实现空调的基础调节:
- 车内温湿度传感器:采集车内温度、湿度数据,实时反馈给空调控制器;
- 空调面板按键:采集用户的空调调节指令(风速、模式),反馈给主机;
- 空调出风口调节电机:接收主机指令,调节出风口的方向。
5. 其他辅助执行器
汽车上各类无需高速控制的小型执行器,均适合采用LIN总线通信:
- 雨刮、喷水电机:接收主机指令,控制雨刮的快慢、喷水动作,反馈工作状态;
- 后备箱锁执行器:控制后备箱的开启、关闭,反馈门锁状态;
- 蜂鸣器、小灯:如倒车蜂鸣器、示廓灯,接收主机指令,实现开启、关闭。
注意:LIN总线不用于动力系统(发动机、变速箱)、底盘系统(ABS、ESP)、安全系统(气囊)等高速、实时、安全相关的场景,这类场景均由CAN总线负责。
六、LIN与CAN的关系与区别(详细对比)
很多人会将LIN总线与CAN总线混淆,实则二者是“搭档关系”,而非竞争关系——CAN总线负责“高速、高可靠、安全相关”的核心场景,LIN总线负责“低速、低成本、简单节点”的辅助场景,二者协同构成汽车车载网络的分层架构。以下是二者的详细对比,清晰区分核心差异:
| 对比维度 | CAN总线 | LIN总线 |
|---|---|---|
| 传输速率 | 高速:标准CAN为50kbps~1Mbps,CAN FD可达10Mbps | 低速:1.2kbps~20kbps,常用9.6kbps |
| 线制结构 | 双线差分(CAN-H、CAN-L),抗干扰能力强 | 单线单端(LIN线+GND),抗干扰能力一般 |
| 网络结构 | 多主结构,多个节点可同时发起通信,需仲裁机制 | 单主多从结构,仅主机发起通信,无需仲裁 |
| 硬件成本 | 较高:CAN控制器+收发器,复杂外围电路 | 极低:仅需LIN收发器,简单外围电路 |
| 抗干扰能力 | 强:差分电平传输,可抵抗车内强电磁干扰 | 一般:单端电平传输,适合干扰较小的车身区域 |
| 容错机制 | 完善:具备总线容错、故障隔离功能,支持节点热插拔 | 简单:仅通过校验和检测数据错误,无复杂容错机制 |
| 应用场景 | 动力系统、底盘系统、安全系统、车载网关(高速、安全、实时) | 车身系统(门窗、座椅、灯光、传感器)(低速、低成本、非实时) |
| 核心作用 | 车载网络的核心骨干,负责关键数据的高速、可靠传输 | CAN总线的辅助,负责低端节点的低成本通信 |
实际车载网络架构中的协同关系
在真实的汽车车载网络中,LIN总线与CAN总线通过“网关”实现协同工作,具体逻辑如下:
- 车身各类LIN从机节点(如门窗电机、传感器),将数据反馈给LIN主机(如BCM);
- LIN主机(BCM)通过网关,将LIN总线上的 data 转换为CAN协议数据,发送到CAN总线;
- CAN总线上的核心控制器(如发动机ECU、ESP控制器),接收并处理相关数据,若需要控制LIN节点,再通过网关将CAN数据转换为LIN协议,发送给LIN主机;
- LIN主机接收指令后,控制对应的从机节点执行动作,完成“CAN-LIN”的跨总线通信。
七、LIN总线的未来发展
随着汽车向 域控制器、中央计算平台 演进,传统分布式ECU的数量逐渐减少,很多人会疑问“LIN总线会被淘汰吗?”答案是:不会。LIN总线的核心优势(低成本、简单、适配低端节点),在未来很长一段时间内仍无法被替代,其发展趋势主要集中在以下几个方面:
1. 持续作为车身域底层接口,长期存在
无论汽车电子架构如何升级,车身系统中仍会存在大量低成本、低速的传感器和执行器(如门窗、灯光、座椅),这类设备不需要高速通信,LIN总线的低成本优势的不可替代,会继续作为车身域的底层通信接口,承担简单节点的通信任务。
2. 规范持续迭代,提升兼容性与功能性
LIN总线规范仍在不断优化,最新的 LIN 2.2A 规范,进一步提升了数据传输的可靠性、节点兼容性,支持更多类型的从机节点;同时,行业正在推进“CAN FD与LIN混合网络”,让LIN总线更好地适配域控制器架构,实现与高速总线的无缝协同。
3. 适配新能源汽车,拓展应用边界
在新能源汽车中,LIN总线的应用场景并未减少,反而有所拓展:除了传统的车身设备,还用于新能源汽车的空调控制系统、座椅加热/通风系统、车内氛围灯、充电口控制等场景;同时,LIN总线的低功耗特性,也适配新能源汽车的节能需求,可通过唤醒机制降低整车静态功耗。
4. 与物联网技术融合,提升智能化水平
未来,LIN总线将与物联网(IoT)、边缘计算技术融合,通过LIN总线采集车身低端设备的运行数据,传输至车身域控制器,再通过车载以太网上传至云端,实现设备状态的远程监控、故障预警、远程诊断,提升汽车车身系统的智能化水平。
总结:只要汽车还有大量低成本、低速的传感器和执行器,LIN总线就不会被淘汰,它将持续与CAN总线、车载以太网协同,构成“高速+低速”“高端+低端”的分层车载网络,支撑汽车电子架构的持续升级。
结语
LIN总线没有CAN总线的高速与高可靠,没有车载以太网的大容量,却以“极简、低成本、稳定”的核心优势,在现代汽车车载网络中占据了不可替代的位置。它就像汽车车身系统的“毛细血管”,看似不起眼,却承担着大量琐碎但必要的通信任务,连接着车身的每一个低端设备,与CAN总线共同构成了稳定、高效、低成本的车载网络体系。
理解LIN总线,不仅是理解一种低成本的串行通信技术,更是理解汽车车身电子最基础、最广泛的通信逻辑——在汽车向智能化、电动化演进的过程中,“高端技术引领发展,低端技术保障基础”,LIN总线正是这份“基础保障”中不可或缺的一环。
💡 Tip
本文部分图片、数据来源于网络,本人水平有限,若文中存在疏漏或表述不当之处,敬请谅解,也欢迎大家在评论区指正交流。